|
Roc Toolkit internal modules
Roc Toolkit: real-time audio streaming
|
|
Roc Toolkit internal modules
Roc Toolkit: real-time audio streaming
|
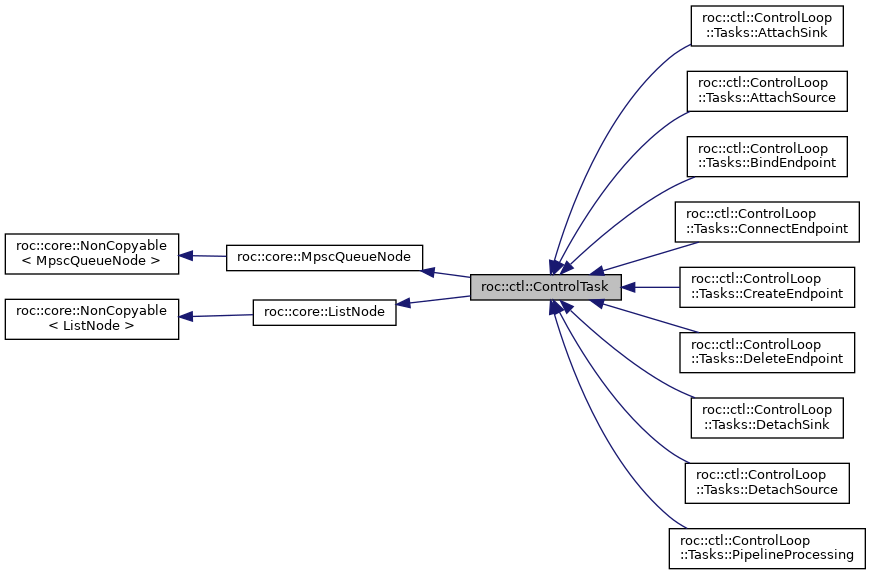
Base class for control tasks. More...
#include <roc_ctl/control_task.h>
Public Member Functions | |
| bool | completed () const |
| True if the task succeeded, failed, or cancelled. | |
| bool | succeeded () const |
| True if the task succeeded. | |
| bool | cancelled () const |
| True if the task cancelled. | |
 Public Member Functions inherited from roc::core::MpscQueueNode< Tag > Public Member Functions inherited from roc::core::MpscQueueNode< Tag > | |
| MpscQueueData * | mpsc_queue_data () const |
| Get pointer to internal data. | |
| Public Member Functions inherited from roc::core::ListNode< Tag > | |
| ListData * | list_data () const |
| Get pointer to internal data. | |
Protected Member Functions | |
| template<class E > | |
| ControlTask (ControlTaskResult(E::*task_func)(ControlTask &)) | |
| Initialize task. | |
Friends | |
| class | ControlTaskQueue |
Additional Inherited Members | |
| Static Public Member Functions inherited from roc::core::MpscQueueNode< Tag > | |
| static MpscQueueNode * | mpsc_queue_node (MpscQueueData *data) |
| Get pointer to parent node from pointer to internal data. | |
| Static Public Member Functions inherited from roc::core::ListNode< Tag > | |
| static ListNode * | list_node (ListData *data) |
| Get pointer to parent node from pointer to internal data. | |
Base class for control tasks.
Definition at line 53 of file control_task.h.
|
inlineprotected |
Initialize task.
| E | is a class derived from IControlTaskExecutor. task_func is a method of E which implements the task. |
Definition at line 71 of file control_task.h.
| bool roc::ctl::ControlTask::cancelled | ( | ) | const |
True if the task cancelled.
| bool roc::ctl::ControlTask::completed | ( | ) | const |
True if the task succeeded, failed, or cancelled.
| bool roc::ctl::ControlTask::succeeded | ( | ) | const |
True if the task succeeded.
|
friend |
Definition at line 88 of file control_task.h.