|
Roc Toolkit internal modules
Roc Toolkit: real-time audio streaming
|
|
Roc Toolkit internal modules
Roc Toolkit: real-time audio streaming
|
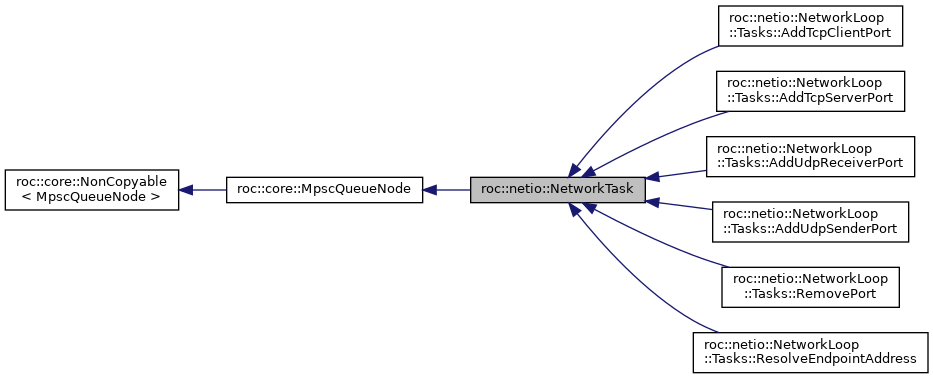
Base class for network loop tasks. More...
#include <roc_netio/target_libuv/roc_netio/network_task.h>
Public Member Functions | |
| bool | success () const |
| Check that the task finished and succeeded. | |
 Public Member Functions inherited from roc::core::MpscQueueNode< Tag > Public Member Functions inherited from roc::core::MpscQueueNode< Tag > | |
| MpscQueueData * | mpsc_queue_data () const |
| Get pointer to internal data. | |
Protected Types | |
| enum | State { StateInitialized , StatePending , StateClosingPort , StateFinishing , StateFinished } |
| Task state. More... | |
Protected Attributes | |
| void(NetworkLoop::* | func_ )(NetworkTask &) |
| Task implementation method. | |
| core::Atomic< int > | state_ |
| Task state, defines whether task is finished already. The task becomes immutable after setting state to Finished. | |
| core::Atomic< int > | success_ |
| Task result, defines wether finished task succeeded or failed. Makes sense only after setting state_ to Finished. This atomic should be assigned before setting state_ to Finished. | |
| core::SharedPtr< BasicPort > | port_ |
| On which port the task operates. | |
| void * | port_handle_ |
| Port handle. | |
| INetworkTaskCompleter * | completer_ |
| Completion handler. | |
| core::Optional< core::Semaphore > | sem_ |
| Completion semaphore. | |
Friends | |
| class | NetworkLoop |
Additional Inherited Members | |
| Static Public Member Functions inherited from roc::core::MpscQueueNode< Tag > | |
| static MpscQueueNode * | mpsc_queue_node (MpscQueueData *data) |
| Get pointer to parent node from pointer to internal data. | |
Base class for network loop tasks.
Definition at line 29 of file network_task.h.
|
protected |
Task state.
Definition at line 42 of file network_task.h.
| bool roc::netio::NetworkTask::success | ( | ) | const |
Check that the task finished and succeeded.
|
friend |
Definition at line 37 of file network_task.h.
|
protected |
Completion handler.
Definition at line 65 of file network_task.h.
|
protected |
Task implementation method.
Definition at line 51 of file network_task.h.
|
protected |
On which port the task operates.
Definition at line 62 of file network_task.h.
|
protected |
Port handle.
Definition at line 63 of file network_task.h.
|
protected |
Completion semaphore.
Definition at line 66 of file network_task.h.
|
protected |
Task state, defines whether task is finished already. The task becomes immutable after setting state to Finished.
Definition at line 55 of file network_task.h.
|
protected |
Task result, defines wether finished task succeeded or failed. Makes sense only after setting state_ to Finished. This atomic should be assigned before setting state_ to Finished.
Definition at line 60 of file network_task.h.